麥克風����,學名“傳聲器”�,是將聲音能量轉(zhuǎn)換為電能量或其他能量形式的電聲器件,可以代替人耳“聆聽”聲音���,通過線纜或無線傳輸技術(shù),將聲音傳遞到音響設(shè)備�����、錄音系統(tǒng)�、通信終端中�����,為信息傳播、藝術(shù)創(chuàng)作�、科學研究創(chuàng)造了無限可能�。
麥克風根據(jù)轉(zhuǎn)換能原理分為:電動式��、電容式�、壓電式等�,應(yīng)用最廣泛的是電動式和電容式兩大類;根據(jù)聲場可分為:自由場���、壓力場和擴散場等。
傳統(tǒng)封裝的電容式麥克風內(nèi)部構(gòu)造:

對于“寸土寸金”的電子設(shè)備��,傳統(tǒng)封裝的麥克風已無法滿足尺寸要求�,由此誕生了MEMS(Micro-Electrical-Mechanical Systems 微機電系統(tǒng))麥克風���,封裝小����、功耗低�,在頻響要求較低的應(yīng)用場景下更有優(yōu)勢��。
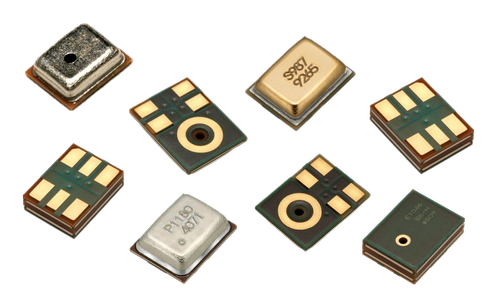
MEMS麥克風:
二����、為什么給麥克風“組隊”���?
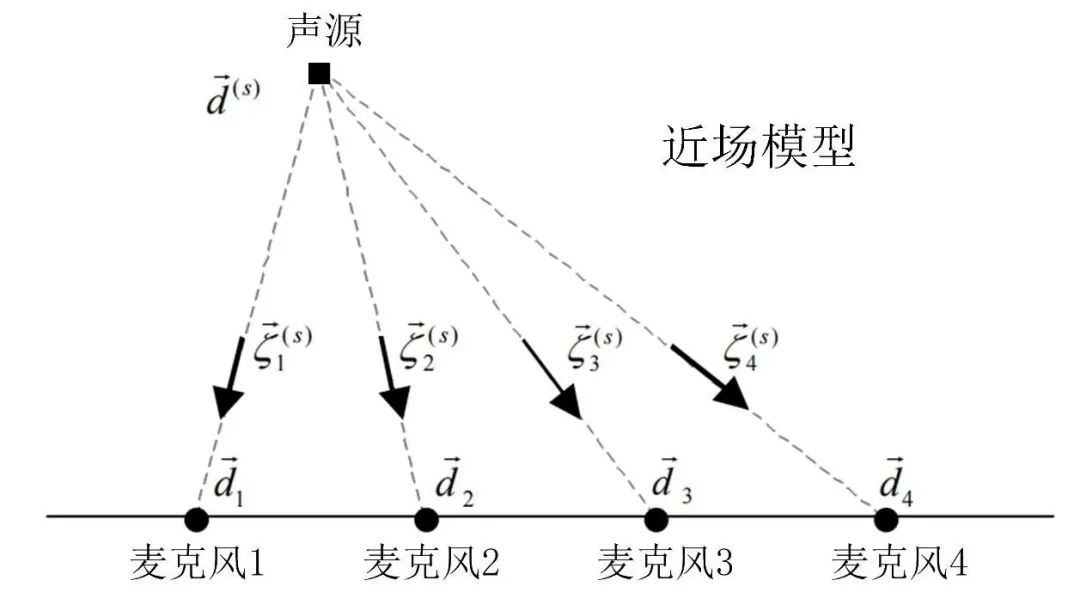
單一的麥克風方向性是固定的,理想的麥克風工作在全向模式��,無法通過聲音獲取有效的位置信息����;而使用多個麥克風組成空間陣列�����,聲波傳播到麥克風陣列時�����,到達不同麥克風的時間存在差異�,通過算法處理就能得到聲源相對于麥克風的到達方向和距離����。
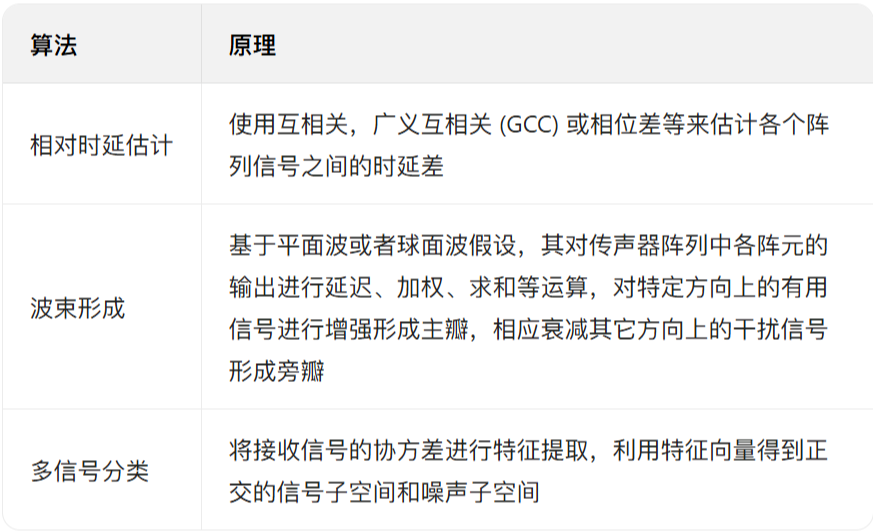
主流聲源定位算法:
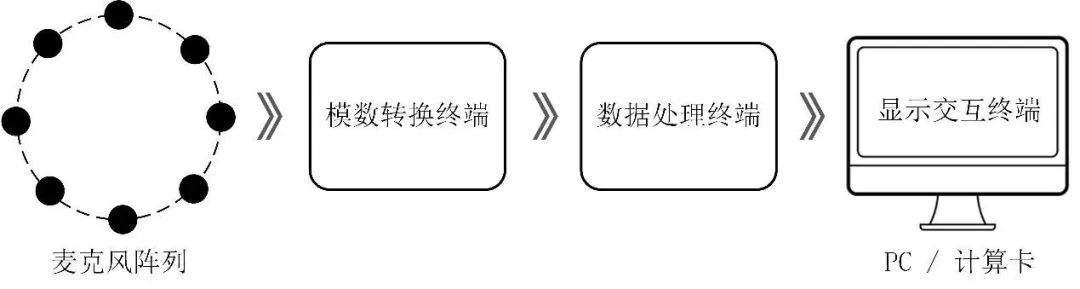
要實現(xiàn)這些算法�,就需要設(shè)計相應(yīng)的麥克風陣列�,采集聲壓能量并轉(zhuǎn)化為數(shù)字信號����,常見的聲源定位系統(tǒng)包含麥克風陣列�、模數(shù)轉(zhuǎn)換終端、數(shù)據(jù)處理終端以及顯示交互終端:
面對市面上五花八門的麥克風陣列產(chǎn)品����,相信很多讀者都會有這樣的疑問:
麥克風通道數(shù)越多越好����?
陣列排布越復雜越好?
陣列設(shè)計越緊湊越好�?
麥克風排布不是“隨便站隊”,而是用科學的陣型�,讓每個麥克風都成為破解空間聲場的“關(guān)鍵棋子”�����。陣列的參數(shù)有麥克風數(shù)量��、陣元間距以及空間分布形式����,評估陣列性能優(yōu)劣的參數(shù)有指向性�����、波束寬度�����、旁瓣抑制等。
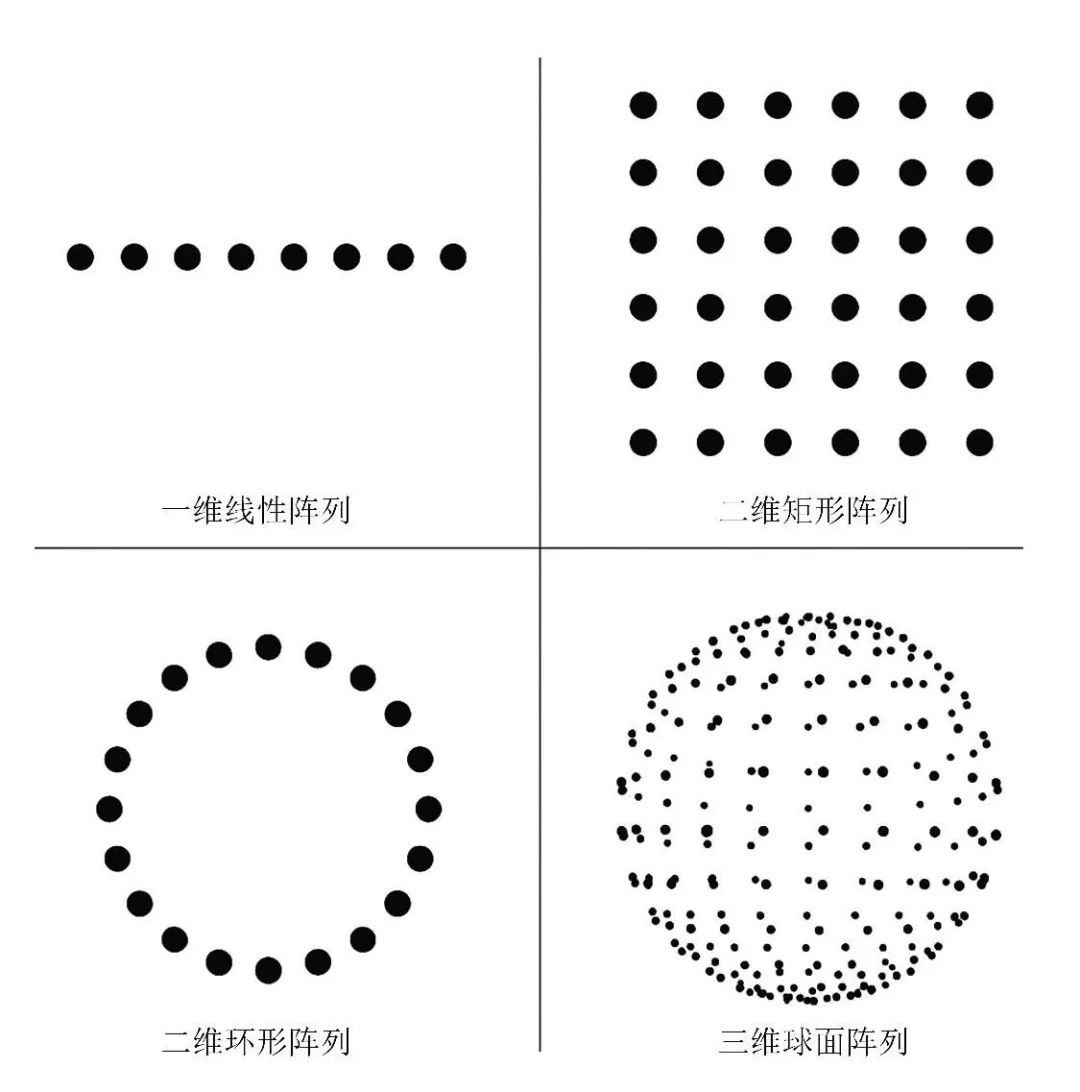
陣列根據(jù)空間特征分為一維線性陣列��、二維平面陣列以及三維陣列����,二維平面陣列中常用的有環(huán)形陣列�����、矩形陣列����、十字陣列、螺旋陣列等�����。
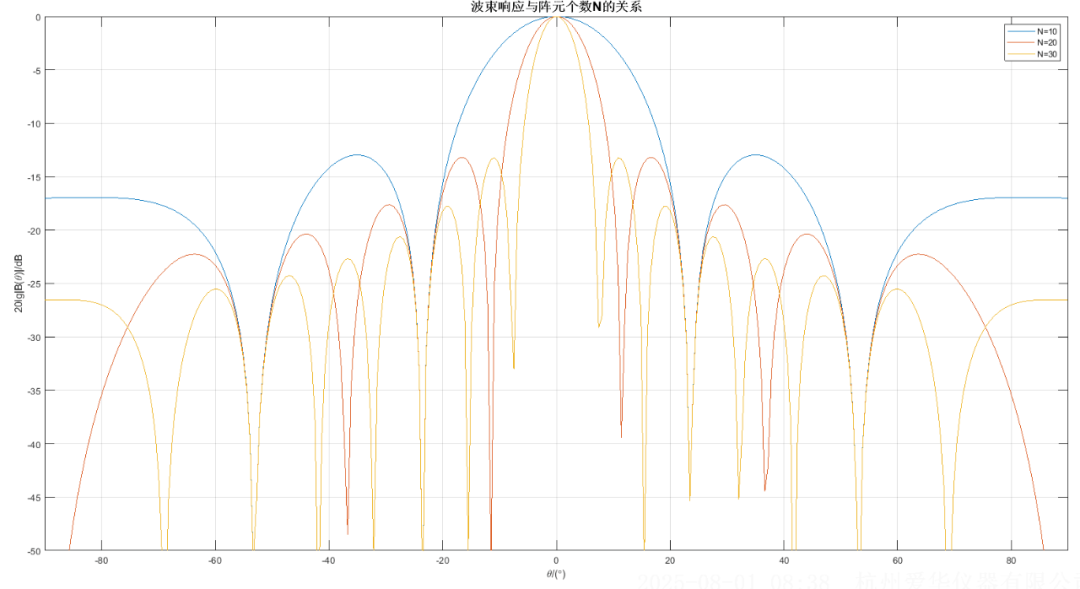
對于一維線性陣列���,隨著麥克風陣元個數(shù)N的增加,主瓣波束越窄�����,指向性越強:
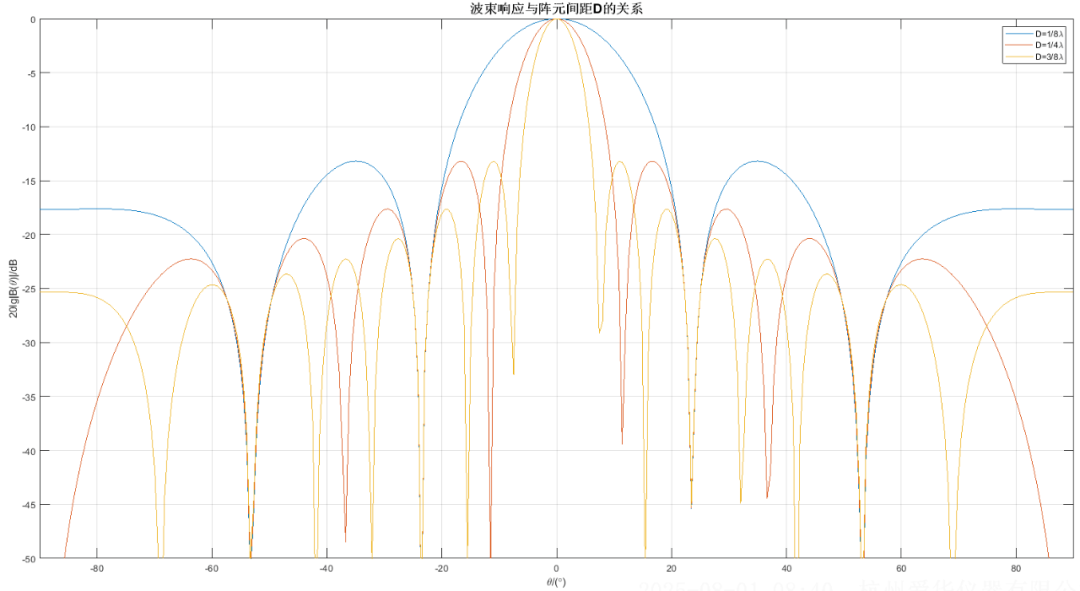
而隨著麥克風陣元間距D的增加,主旁瓣的差距越大��,旁瓣衰減越快�,指向性越強(為了避免柵瓣出現(xiàn)�����,陣元間距被限制在1/2λ內(nèi)):
由于維度限制,一維線性陣列無法提供聲源在垂直于陣列平面方向的任何信息����,為提高空間分辨能力,將陣列拓展到二維平面�����。
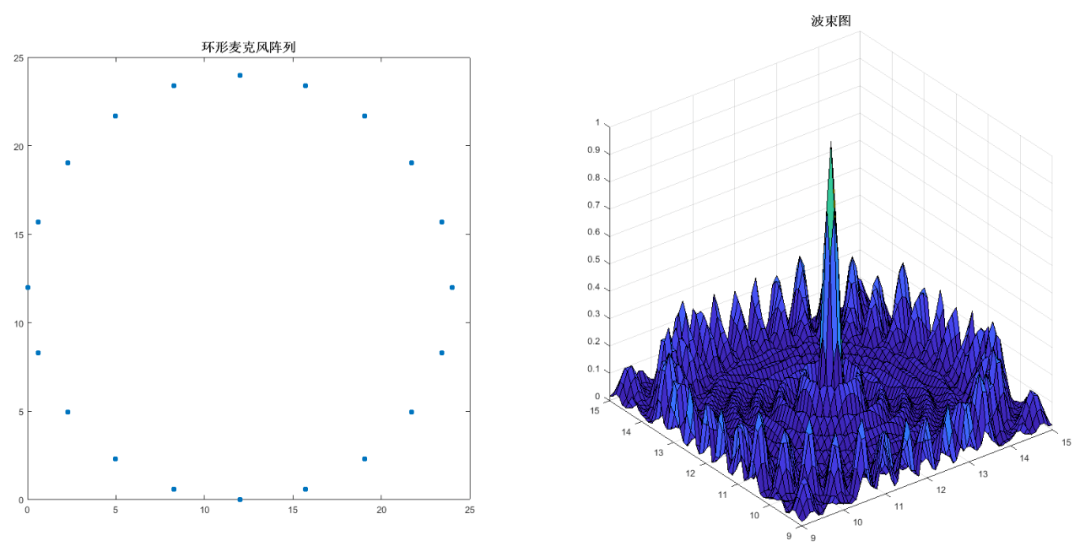
以常見的二維平面環(huán)形陣列為例��,聲源頻率越高����,方向圖衰減越快��,定位效果越好:
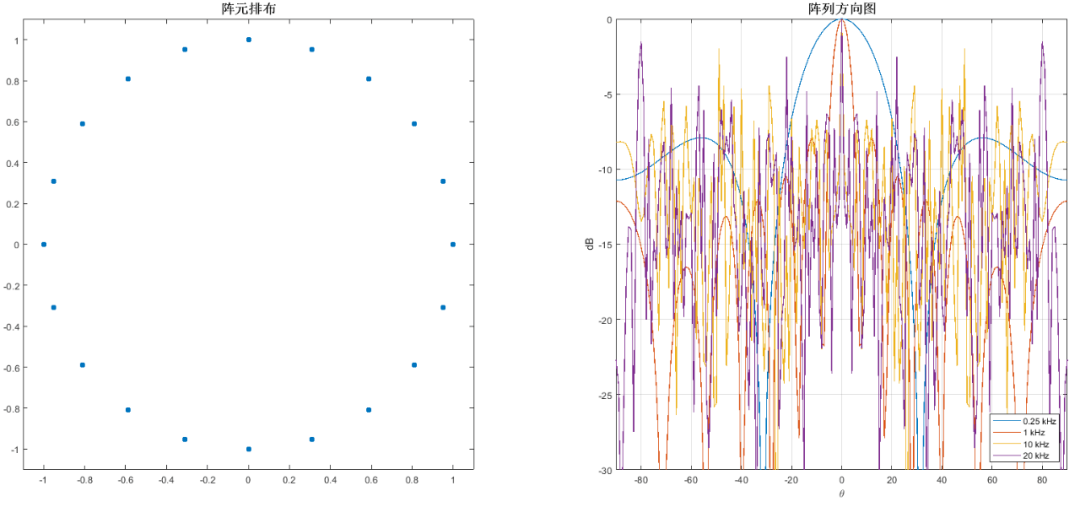
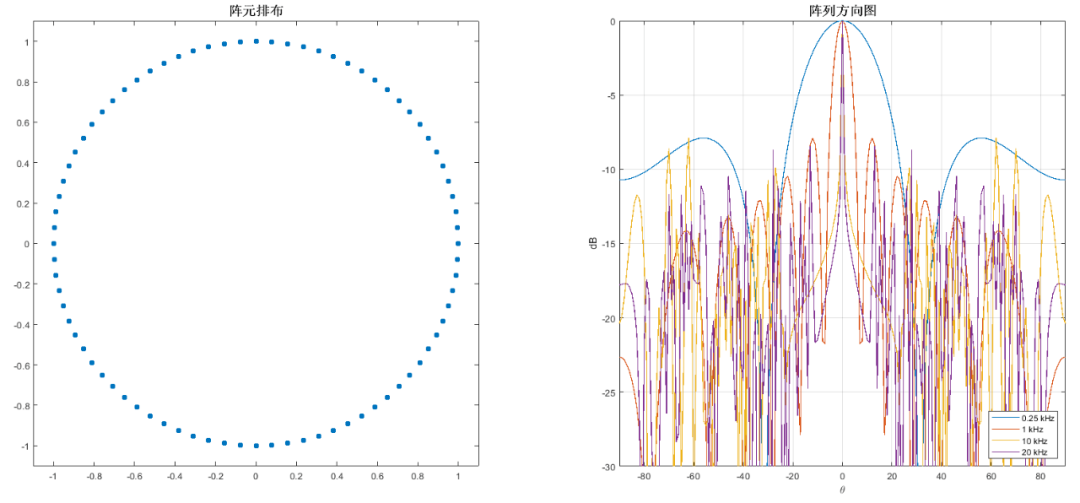
保持環(huán)形陣列陣元半徑不變,通道數(shù)量增多時���,主旁瓣差距越大����,指向性與抗干擾能力越強:
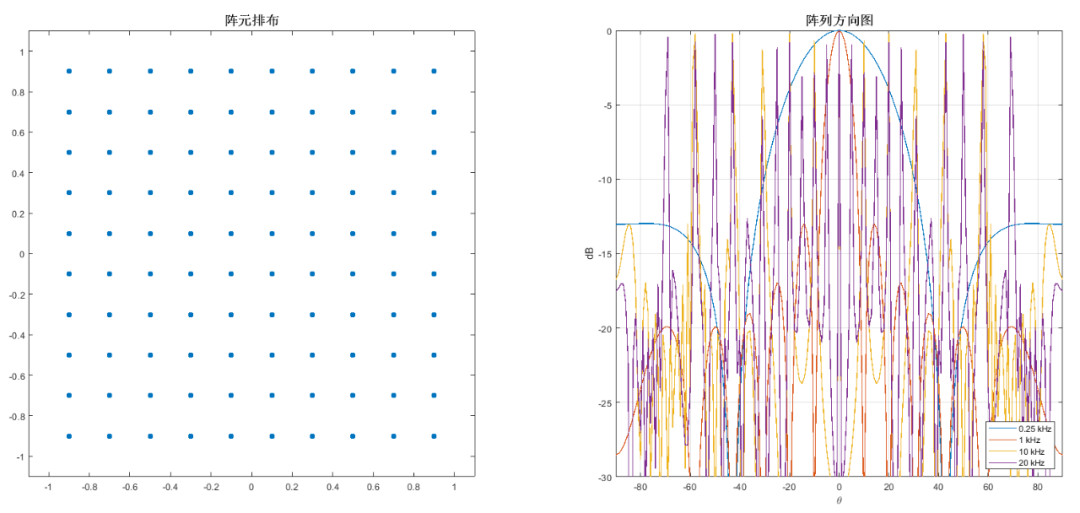
對于不同的麥克風排布����,不同頻段內(nèi)定位效果也存在差異,一般根據(jù)需要評估適合的麥克風陣型�����。
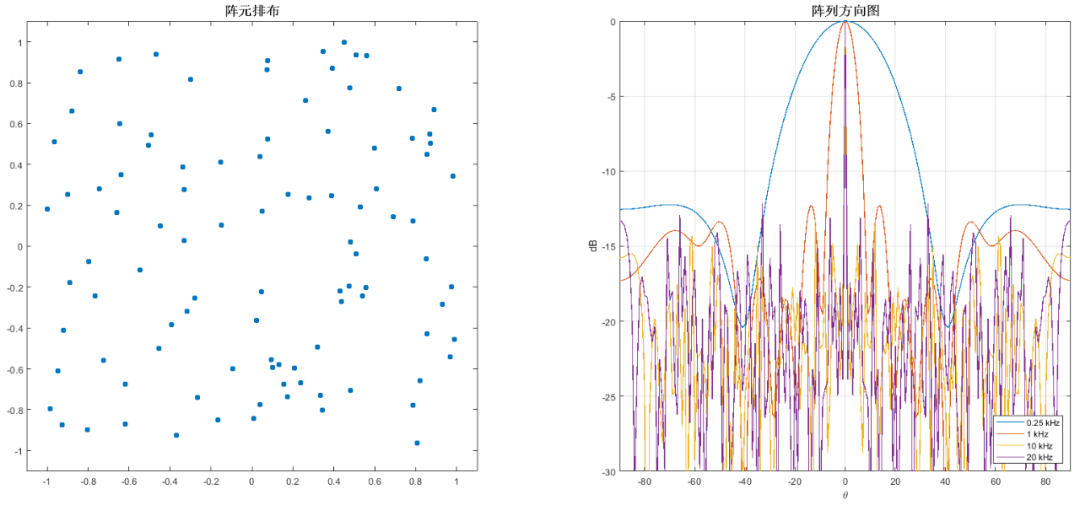
螺旋陣列:
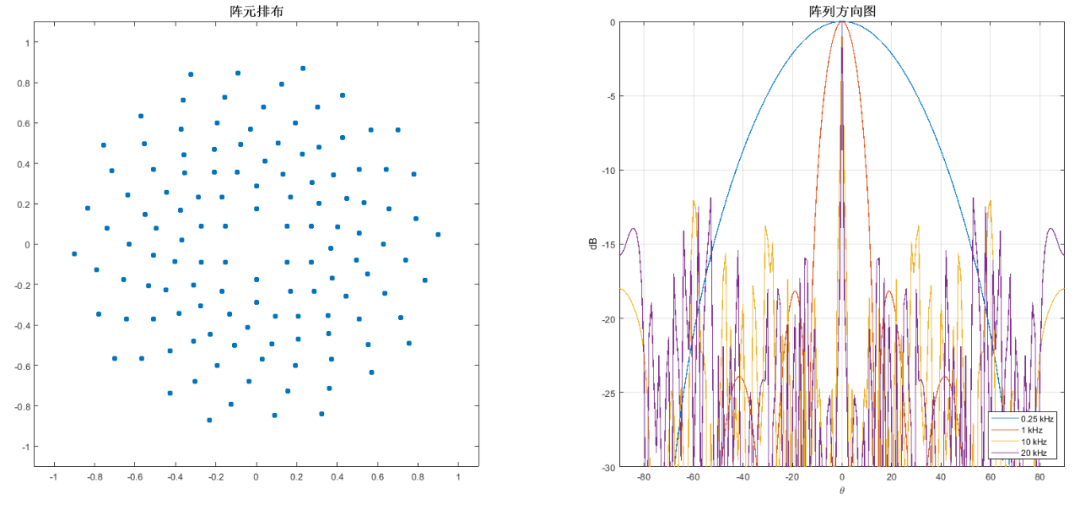
通過幾種二維平面陣列的對比可以看出:通道數(shù)接近時,螺旋陣列通過非均勻密度分布與數(shù)學優(yōu)化幾何排布的方式�����,能達到寬頻段覆蓋范圍�,柵瓣抑制效果更好�,抗干擾能力強�,且陣型結(jié)構(gòu)相對規(guī)律,硬件實現(xiàn)更加簡單��。
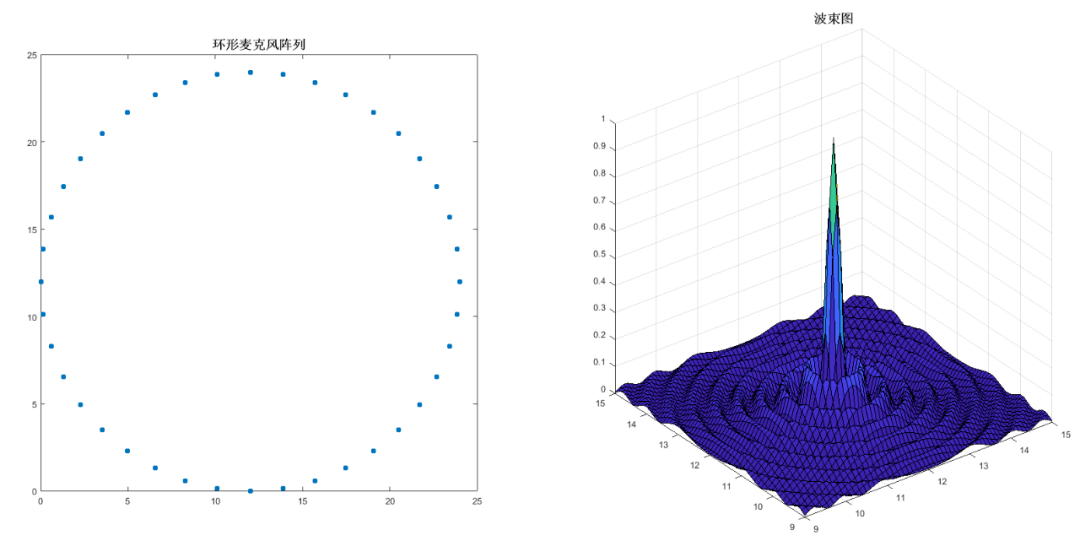
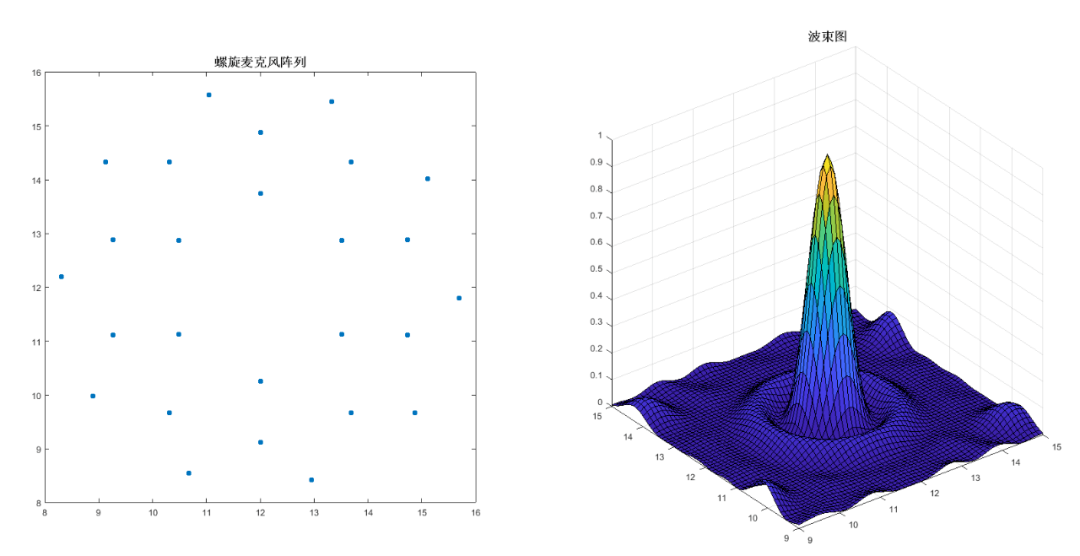
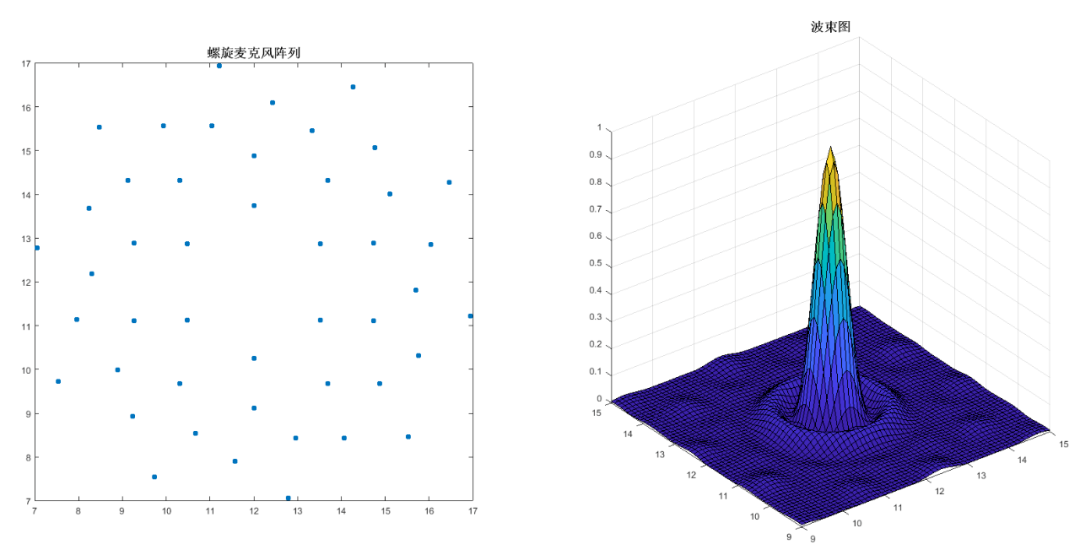
對于相同的陣型排布,通道數(shù)量越多�����,主瓣越窄����,分辨率越高。
通過以上這些案例��,我們已經(jīng)發(fā)現(xiàn)不同的陣列排布類型�,在不同的頻段存在各自的優(yōu)勢,而堆砌麥克風數(shù)量似乎是筆穩(wěn)賺不賠的買賣:陣元越多����,可形成的波束會越窄,能量匯聚的效果越好�。
麥克風數(shù)量真的“多多益善”嗎�����?
對于N個全向麥克風組成的陣列,在各向同性噪聲環(huán)境下�����,理論最大增益為:

將增益與麥克風數(shù)量關(guān)系繪制成一張圖表:
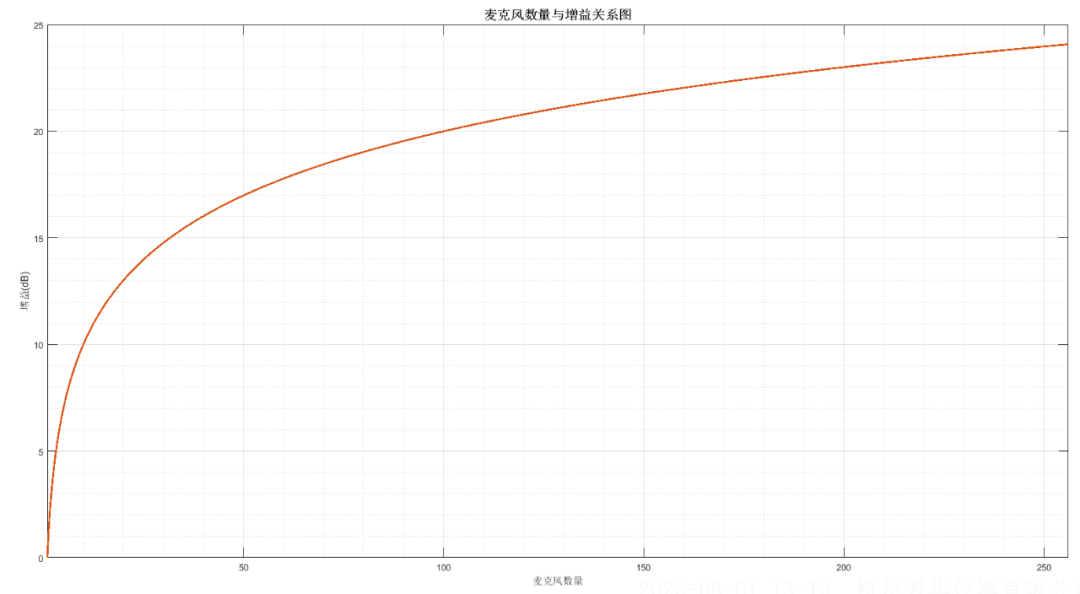
這意味著麥克風數(shù)量到達一定量級后,增加數(shù)量得來的收益會越來越少��,而且單純地增加麥克風數(shù)量�,會導致硬件復雜度飆升,算法計算量指數(shù)級增長��。
設(shè)計陣列時���,需要兼顧目標頻段���、分辨率等�����,與硬件成本��、實現(xiàn)難度的關(guān)系���,實現(xiàn)最優(yōu)聲源定位效果�����。
四、麥克風陣列應(yīng)用場景��?
麥克風陣列廣泛應(yīng)用于科學研究���、工業(yè)故障診斷、環(huán)境噪聲監(jiān)測等領(lǐng)域����,其核心能力包括聲源定位����、噪聲抑制和語音增強。
如下是我司基于麥克風陣列進行聲源定位應(yīng)用的部分產(chǎn)品:
基于陣列波束成形技術(shù)和圖聲融合成像技術(shù)研發(fā)�����,具備超聲成像����、泄露檢測、PRPD局放模式��、聲源識別等功能:

結(jié)合云臺進行全視角聲學成像,通過網(wǎng)絡(luò)與控制終端進行數(shù)據(jù)交互����,主要應(yīng)于氣體泄漏檢測、電力設(shè)備局部放電檢測等場景�����,儀器自動執(zhí)行監(jiān)測任務(wù)��、超標抓拍等功能�。全采用全鋁機殼��,整機IP65防護等級�,可長期戶外部署:

極小尺寸陣列,陣元間距緊湊�����,儀器體積小巧�,結(jié)合機器狗或各類巡檢機器人���,采用無線方式進行數(shù)據(jù)交互����,可用于多場景故障巡檢:

采用高靈敏度數(shù)字麥克風��,陣列尺寸600mm��,適合遠距離探測,可探測大于500米的距離�,可應(yīng)用于固定點位故障監(jiān)測、低空飛行器軌跡探測:

手持式電容麥克風陣列,搭配我司AWA144XX 系列測量傳聲器�,頻率響應(yīng)更優(yōu)����,適合精度要求更高的科研領(lǐng)域:

麥克風陣列只是聲源定位領(lǐng)域的“排頭兵”��,通過更加深入復雜的信號處理技術(shù)和優(yōu)化方法����,可以得到更出色的性能,保障算法處理的效果����。